
Procédé 3D Ensenso Comment fonctionne la stéréovision à texture projetée ?
Stéréovision
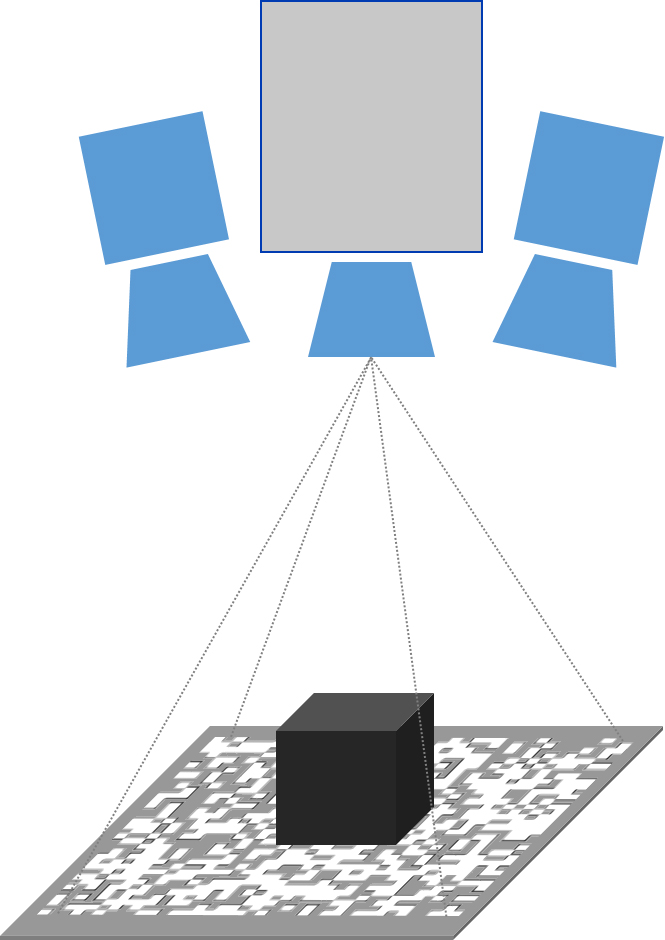
Les caméras stéréovision Ensenso fonctionnent selon le principe de la vision spatiale stéréovision, qui est inspirée de la vision humaine.

Deux caméras visualisent une scène selon deux positions différentes. Même si le contenu des images des deux caméras semble identique, il existe des différences dans l’emplacement des objets observés. Dans la comparaison des images, des algorithmes spéciaux cherchent des pixels et visualisent leur disparité sur une carte avec toutes les différences trouvées (carte de disparité).
Étant donné que la distance et l’angle d’observation des caméras sont connus, le logiciel Ensenso peut alors convertir ces différences au moyen d’un procédé de triangulation en longueurs connues et déterminer ainsi les coordonnées 3D des points objet pour chaque pixel de l’image. Il en résulte un nuage de points 3D qui constitue la base pour de nombreuses applications dans lesquelles les informations spatiales relatives aux objets sont nécessaires.

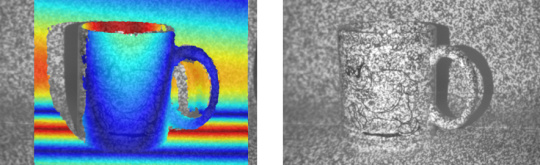
Le procédé d’appariement de la comparaison des images s’appuie sur les variations de contraste et de luminosité des pixels. La qualité de la stéréovision dépend ainsi directement des conditions de lumière et des propriétés de surface (textures) des objets dans la scène. Ainsi, les surfaces peu texturées ou réfléchissantes ne permettent de reconnaître, de comparer et de localiser qu’un petit nombre de pixels marquants. Il en résulte des informations de profondeur incomplètes sur la scène.
Grâce à une projection de motif spéciale, les caméras Ensenso améliorent le procédé stéréovision classique. Les résultats de mesure obtenus sont plus précis, sans oublier une meilleure qualité des informations de profondeur. Ces améliorations permettent d’utiliser la stéréovision dans des domaines d’application jusqu’ici limités.
Projecteur de motif
Au moyen d’un masque de motif, le projecteur très lumineux des caméras Ensenso projette même dans des conditions de luminosité difficiles une texture très contrastée sur l’objet à représenter et compense ainsi sur ses surfaces le manque ou l’absence de structures.
C’est pourquoi l’on parle dans le cas d’Ensenso de « stéréovision à texture projetée ». Avec les structures de soutien sur les surfaces de l’objet, le procédé d’appariement peut reconnaître un bien plus grand nombre de pixels, de même que leur changement de position, et créer ainsi des informations de profondeur homogènes et plus complètes sur la scène.
FlexView
Le degré de détail de la carte de disparité dans les scènes statiques peut être encore amélioré au moyen de la technologie FlexView. Le masque de projet peut être déplacé linéairement en très petites étapes dans le rayon lumineux par piezo mécanique à faible usure. La texture projetée se déplace ainsi parallèlement sur les surfaces des objets de la scène et crée d’autres structures de soutien. Plusieurs paires d’images de la même scène statique avec différentes structures sont acquises, ce qui crée un bien plus grand nombre de pixels. La résolution s’en trouve augmentée. L’algorithme d’appariement stéréo combine les informations de toutes les paires d’images afin de calculer des images de disparité et des nuages de points bien plus détaillés.
Parallèlement à la résolution, la robustesse des données augmente aussi pour les surfaces difficiles, puisque les structures de motif décalées apportent des informations supplémentaires sur les surfaces brillantes, foncées ou réfléchissantes. De nombreux algorithmes de traitement profitent de cette résolution améliorée et du bruit inférieur. FlexView permet de réduire les étapes de retouche ultérieures au nuage de points nécessaires et la durée des étapes de traitement 3D subséquentes.
La capture d'image avec FlexView montre les détails nécessaires aux applications de surveillance de la qualité, comme les travaux de mesure ou le compte de dents des roues d'engrenage.
La capture d'image sans FlexView avec un débit de données élevé est utilisée par exemple dans les applications telles que le « prélèvement dans la caisse » ou les contrôles de présence.
Comparaison de FlexView1, de FlexView2 et des données d’acquisition unique (Single Shot Data)
Ensenso offre des caméras avec ou sans technologie FlexView. Chaque variante est optimisée et adaptée à des utilisations spécifiques. Le mouvement de l’objet joue ici un rôle décisif.
Les caméras sans FlexView ou avec la technologie FlexView1 utilisent une texture très contrastée sous la forme d’un motif de points aléatoire. À partir de quelques paires d’images déjà, ces motifs permettent de transmettre très rapidement des informations de profondeur sur une scène. Les caméras offrant de tels motifs sont donc bien adaptées aux objets en mouvement.
Inversement, dans le cas d’objets statiques, les caméras FlexView1 bénéficient d’algorithmes supplémentaires qui peuvent créer une plus grande résolution avec plusieurs paires d’images acquises avec des motifs de points déplacés. Avec 3 à 5 paires d’images uniquement, il est ainsi possible de doubler environ la résolution X, Y et Z. Par contre, la durée de l’acquisition et du traitement augmente avec chaque nouvelle paire d’images. Après 8 paires d’images environ, la qualité du résultat avec FlexView1 n’augmente plus de façon perceptible.
Les caméras dotées de la nouvelle technologie FlexView2 reposent sur un masque de motif spécialement développé avec des algorithmes optimisés à cet effet qui augmentent de plus du double la résolution dans les directions X, Y et Z par rapport à FlexView1 dans le cas des objets statiques.
Limitation : En raison du motif spécial, cette optimisation n’est effective qu’à partir de 5 paires d’images environ.

Motif de points aléatoire sur le masque de projecteur pour les caméras sans FlexView ou avec FlexView1. Optimal pour les données d’acquisition unique.

Des tracés de luminosité supplémentaires dans les motifs FlexView2 appuient l’algorithme optimisé dans la reconnaissance de profondeur à partir de 5 paires d’images environ.
Sans FlexView
(données d’acquisition unique)
Adapté à :
Utilisations rapides ou objets en mouvement
Acquisition et évaluation des images très rapides puisqu’une seule paire d’images est traitée
Aussi utilisable pour les objets en mouvement
Motif optimisé de projecteur pour les données d’acquisition unique
FlexView1 et FlexView2
(en mode d’acquisitions multiples)
Adapté à :
Utilisations avec des objets statiques, pour lesquels une grande précision et un niveau de détail élevé sont nécessaires
Amélioration nette de la résolution et de la qualité des informations de profondeur
Détails des objets et contours plus définis
Aussi en présence de surfaces difficiles (réfléchissantes, peu texturées)
Uniquement utilisables pour des objets statiques
Temps de traitement plus long
Vision 3D intégrée
Le traitement intégré des données de la nouvelle série Ensenso XR prend parfaitement en charge la technologie FlexView 2 avec 16 paires d'images maximum, en particulier avec les scènes statiques. Les processus nécessitant une grande puissance de calcul pour le traitement stéréo Ensenso sont totalement mis en œuvre sur la caméra avec une accélération matérielle. L'enregistrement d'images et le traitement peuvent ainsi fonctionner de concert, sans attente, grâce au transfert réseau. La combinaison de la technique FlexView 2 et de la parallélisation élevée du traitement stéréo dans le FPGA de la caméra permet de produire des nuages de points haute résolution d'objets fixes avec une fréquence d'images très élevée. La qualité des données 3D générées augmente avec la résolution d’image et chaque paire d’images, sans le retard additionnel dû au transfert des données vers un PC hôte.