Procédé 3D Ensenso
Comment fonctionne la triangulation par points laser basée sur l'IA ?
Vision tridimensionnelle avec lumière structurée
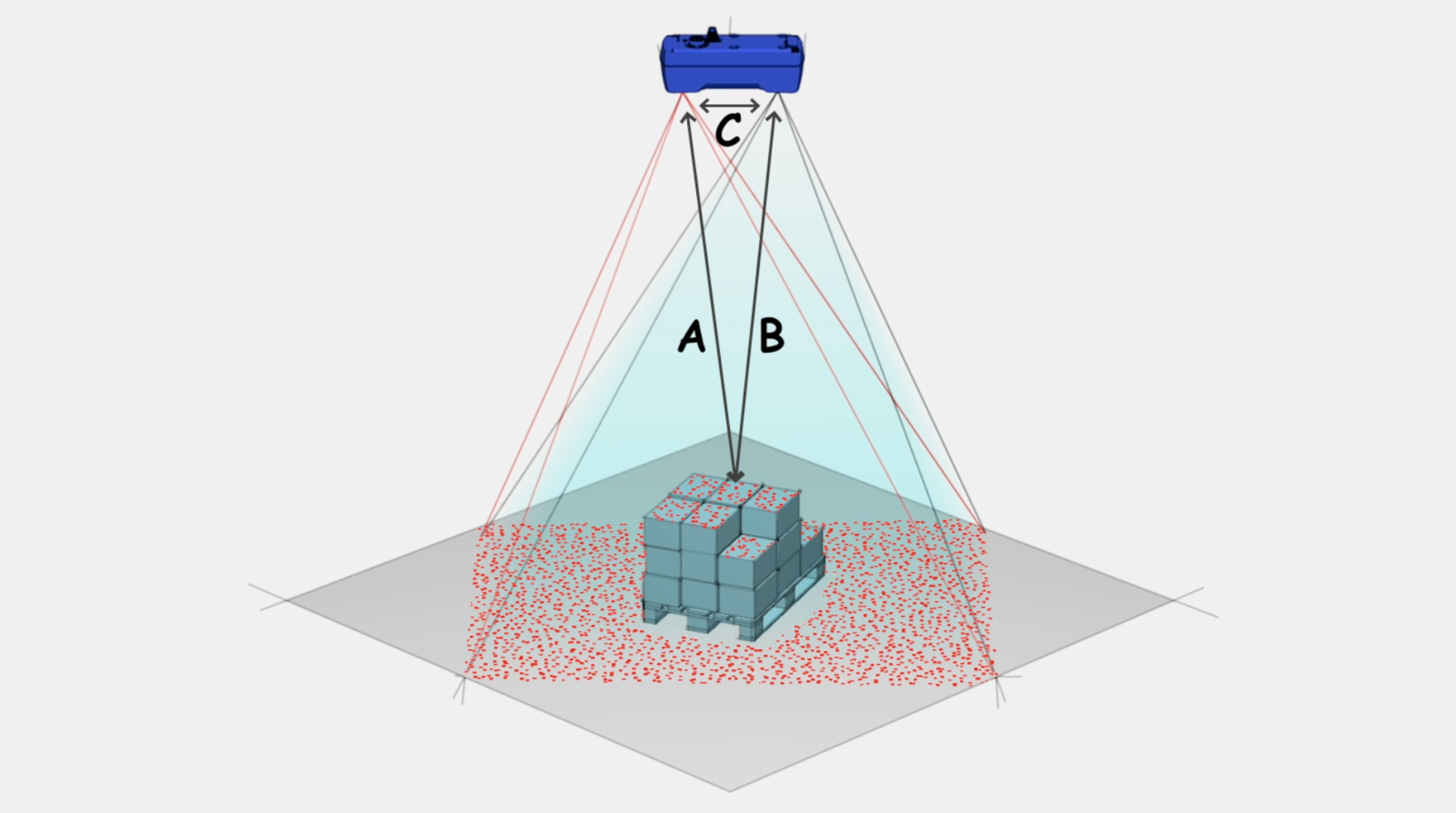
Les caméras Ensenso de la série S fonctionnent avec une lumière structurée. Un laser infrarouge (IR) projette un motif irrégulier de points dans l'espace de l'objet. Ces points sont enregistrés par une caméra depuis une position légèrement différente. Cependant, l'image du motif de points varie aux endroits où les objets réfléchissent la lumière. Les points de l'image laser correspondante s'écartent de leur position attendue en fonction de la distance entre l'objet et la source lumineuse. Les déviations des positions des points constituent la base de l'information sur la profondeur.
Contrairement aux méthodes 3D LIDAR ou Time of Flight (ToF), qui sont également basées sur la lumière laser, la profondeur spatiale de chaque point de projection capturé et donc du nuage de points ne résulte pas de mesures du temps de vol de la lumière, mais de la triangulation, comme utilisée avec les caméras stéréovision Ensenso.
La base de ce calcul est une déviation de la position du point laser (= « disparité »), qui résulte de deux angles de vue, comme dans la vision spatiale (stéréovision). Cependant, les méthodes 3D telles que celle de l'Ensenso S n'enregistrent l'espace de l'objet qu'avec une seule caméra. Comment est-il possible d'extraire les différences de position des points à partir d'une seule image de caméra du motif projeté ?
Le projecteur lui-même est la source des informations nécessaires. La projection dite DOE (optique diffractive) génère une « image ponctuelle » fixe dont la position des points est ainsi connue. Connaissant la distance et l'angle de vue des deux images ponctuelles, la méthode de triangulation du logiciel Ensenso peut déterminer les coordonnées 3D de chaque point laser (visible).
Lumière structurée
Le laser IR projette une disposition fixe de points lumineux dans l'espace de l'objet. L'optique dite diffractive (DOE) est utilisée pour générer le motif de points. Leurs microstructures fines assurent la division et la diffraction ciblées de la lumière laser, de manière à créer la distribution lumineuse souhaitée.
La DOE permet une distribution uniforme de l'intensité de la lumière et assure également une émission presque sans perte de l'énergie du faisceau. En combinaison avec la lumière laser à bande étroite, il est possible de générer un motif de points avec un contraste très élevé, même avec un faible éclairage ambiant.
Correspondance de points accélérée par l'IA
Pour calculer les informations de profondeur à l'aide de la triangulation, le point d'image correspondant doit d'abord être déterminé pour chaque point de projection. Cependant, l'identification d'un point parmi d'autres n'est pas une tâche triviale pour les algorithmes de traitement d'images basés sur des règles lorsque les positions attendues des points sont décalées par les réflexions lumineuses des objets. La solution : l'« intelligence artificielle ».
Quelle technologie serait la mieux adaptée pour détecter et classer des caractéristiques aux innombrables variations ? Le logiciel Ensenso utilise donc un réseau neuronal artificiel pour identifier des points dans l'image de la caméra. Il a été formé au préalable aux inclinaisons et distorsions du motif utilisé.
Avantages de la triangulation par points laser basée sur l'IA
Grande précision de la profondeur
Données 3D* solides et exactes géométriquement avec une grande précision de la profondeur grâce au taux de réussite élevé de la correspondance des points via le réseau neuronal artificiel.
Faible éclairage ambiant
Utilisation avec un faible éclairage ambiant grâce à l'éclairage IR

Acquisition d'images rapide
Acquisition et évaluation des images rapides puisqu’une seule Image de caméra d’images est traitée

Accélération IA
Jusqu'à 20 nuages de points par seconde grâce à l'accélération du réseau neuronal artificiel

Aucun flou de mouvement
Idéal pour les objets en mouvement sans flou avec un temps d'exposition court et une émission laser élevée.
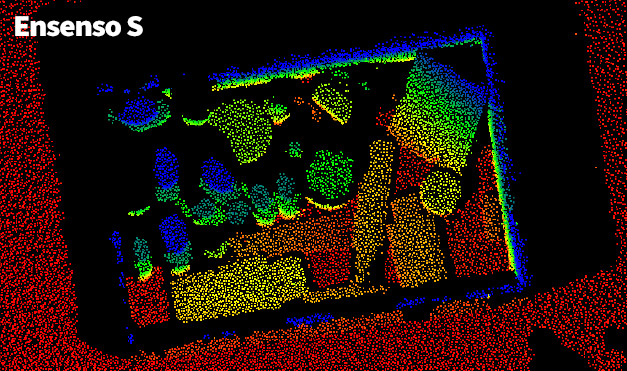
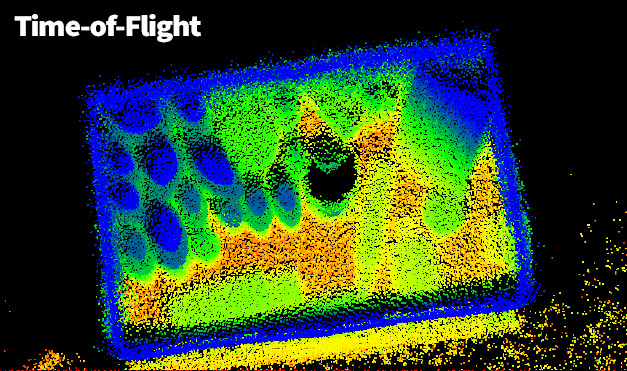
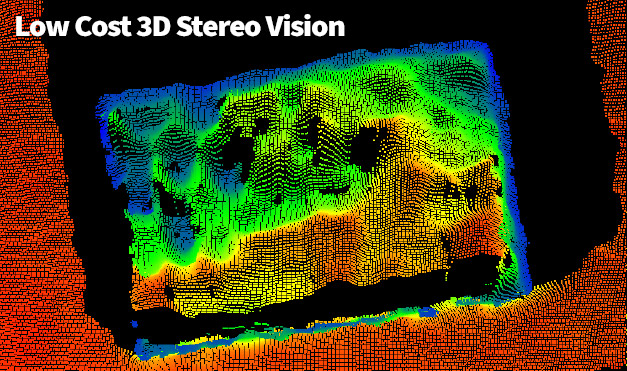
(*) Ensenso S10 génère des données 3D exactes géométriquement avec une grande précision de profondeur par rapport aux caméras 3D utilisant des techniques de temps de vol (ToF) ou de stéréovision 3D à faible coût.
SÉLECTEUR D' ENSENSO
Notre sélecteur de caméra Ensenso vous permet de sélectionner facilement les composants. Une fois que vous avez entré vos conditions de travail, le configurateur en ligne vous propose les meilleurs systèmes Ensenso possibles pour votre application.