Détermination de la position basée sur la vision pour les travaux d'installation et de mesure sur des installations sous-marines
En position sur la mer agitée
Le monde sous-marin constitue même l'un des environnements de travail les plus hostiles. Non seulement la mauvaise visibilité, la haute pression et les courants variables rendent les conditions plus difficiles, mais les conditions en constante évolution, la corrosion et les dépôts transforment également les activités sous-marines en défi. Pour les exploitants d'éoliennes offshore ou de plateformes de forage, cela fait partie de leur quotidien, tant dans la construction des installations que dans leur entretien. Le positionnement précis représente toujours une condition de base importante pour effectuer des travaux de toutes sortes en haute mer. Forssea Robotics propose avec la caméra de navigation NAV CAM SUBSEA un système tout-en-un pour les véhicules sous-marins permettant de déterminer avec précision le positionnement relatif et absolu des installations sous-marines. Une caméra-industrielle de la société IDS Imaging Development Systems GmbH apporte la vision nécessaire.
Application
Les exigences en matière de positionnement et de mesure des installations offshore sont élevées. Cela vaut aussi bien pour la détermination exacte de la position des différentes installations en haute mer que pour l'alignement de toutes les installations, par exemple d'un parc éolien, les unes par rapport aux autres. La précision est de rigueur.
En raison des conditions environnementales défavorables, les appareils utilisés dans ce domaine doivent être conçus aussi simplement et intelligemment que possible. La caméra de navigation sous-marine de Forssea Robotics résout ce problème en utilisant des marqueurs. Elle détecte et suit les marquages qui sont appliqués aux installations sous-marines, comme les pièces d'embase des éoliennes. À partir de là, elle calcule leur positionnement relatif et absolu et crée ainsi la base pour la réalisation des travaux d'installation et de mesure. Le positionnement exact des composants est alors possible.

La caméra pré-calibrée surveille les marquages et envoie les images en temps réel à l'ordinateur intégré pour traitement. Celui-ci rassemble les informations visuelles à l'aide d'un logiciel spécial - le système V-LOC (Visual Localisation System) - et émet un message de navigation. Tous les calculs sont donc effectués directement dans la caméra. Cela permet d'éviter la transmission de données à large bande passante vers la partie supérieure.

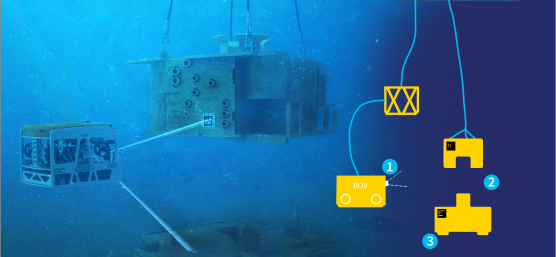
La NAV CAM SUBSEA est conçue pour être montée sur des véhicules sous-marins télécommandés ou autonomes (ROV ou AUV) et leur sert directement de centre de navigation et de contrôle. Elle dispose d'un processeur graphique et d'un capteur de pression intégrés ainsi que d'un système de navigation interactif. Pour les systèmes ROV existants, c'est donc la première étape vers des capacités autonomes. Une intelligence en temps réel est intégrée : V-LOC calcule le cap directionnel et la position du marqueur. La trajectoire, l'inclinaison et l'angle de rotation de la caméra sont alors pris en charge par le ROV. La précision relative XYZ à 3 m de distance du ROV par rapport à l'objet cible est d'environ 3 mm. Les systèmes Open Source comparables se situent actuellement autour de 10 à 20 mm. Les marqueurs fournis par Forssea sont certifiés avec une durée de vie de plus de 25 ans et sont résistants à la vie marine.

La caméra de navigation peut, par exemple, être utilisée sur le ROV ARGOS, également développé par Forssea Robotics. ARGOS est un ROV léger et intelligent, conçu pour une profondeur allant jusqu'à 500 m. Avec des modifications simples, le véhicule peut plonger jusqu'à 2 000 m. Cependant, comme la caméra Forssea utilise des balises Open Source, le client n'est pas limité aux systèmes propriétaires. La NAV CAM est entièrement compatible avec les capteurs gyroscopiques externes (capteurs d'accélération ou de position) ou les systèmes de jaugeage des navires. En option, elle est également disponible avec une boîte à outils IA à la demande pour marquer et suivre des objets sans utiliser de marqueurs.
Caméra
L'emplacement particulier d'une caméra de navigation pour les véhicules sous-marins impose également certaines exigences à la caméra-industrielle intégrée. Ses images servent en effet de base à tous les calculs de position.
« Nous cherchions une caméra qui ne laisse rien à désirer en termes de gamme dynamique, de sensibilité et de linéarité. Néanmoins, elle devait être compacte et respecter notre budget. Nous l'avons trouvée chez IDS. La UI-5270CP-C-HQ Rev.2 a répondu à toutes nos exigences. »
Le modèle de caméra avec capteur à obturateur global 1/1.8" IMX265 de Sony offre une résolution de 3,2 MP (2056 x 1542 pixels) et une fréquence de 38 images/s grâce à l’interface GigE. Son capteur extrêmement sensible à la lumière est considéré comme l'un des meilleurs capteurs d'images CMOS de la classe des 3 MP et garantit une excellente qualité d'image même dans des conditions de faible luminosité.
La caméra-industrielle UI 5270CP-C-HQ Rev.2 fait partie de la gamme de produits uEye CP. Le sigle CP correspond à « Compact Power » (puissance compacte). Ce condensé de puissance pour les applications industrielles de toutes sortes offre un maximum de fonctionnalités avec un prétraitement approfondi des pixels. Les caméras fournissent des données à pleine vitesse GigE et permettent également une alimentation par câble unique jusqu’à 100 mètres grâce au PoE (« Power over Ethernet »). Les utilisateurs peuvent choisir parmi un grand nombre de capteurs CMOS avec une large gamme de résolutions. Les caméras uEye CP sont adaptées notamment aux applications des domaines de l'automatisation, de l'automobile, de la technologie médicale, des sciences de la vie et de la logistique. Elles ne déméritent pas non plus en robotique, installées par exemple dans un véhicule sous-marin, grâce à la conception brevetée du boîtier, dont les dimensions ne sont que de 29 x 29 x 29 millimètres.

Perspectives
Les caméras développées par Forssea Robotics sont principalement utilisées dans l'industrie sous-marine. Cependant, l'entreprise développe également une version aérienne de la technologie de positionnement basée sur la vision.
La NAV CAM AIR est un centre de positionnement et d'inclinaison visuel global basé sur la surface, conçu, par exemple, pour surveiller les supports des éoliennes et autres structures maritimes. Ici aussi, toutes les images sont traitées en temps réel avec le logiciel interne pour obtenir un positionnement très précis.
Le traitement des images offre un large éventail d'applications sur terre, dans ou sur l'eau. Il facilite toutes sortes d'activités, les accélère ou les rend simplement possibles. Grâce à lui, l'une ou l'autre éolienne offshore se trouve exactement en position - ici, avec une caméra-industrielle IDS dans la NAV CAM SUBSEA. Encore faut-il que le vent souffle.
Forssea Robotics
Forssea Robotics développe des solutions robotiques entièrement intégrées pour réduire les coûts d'exploitation sur les marchés de l'énergie offshore. Les outils sous-marins de Forssea combinent un matériel plug & play rentable, une intelligence intégrée spécialement conçue et une surveillance en temps réel.

uEye CP
Modèle utilisé : UI 5270CP-C-HQ Rev.2

Depuis plus de dix ans, elle conçoit des profils d'entreprise, des brochures et des études de cas, et accompagne aussi bien des sujets d'entreprise que la communication technique sur les produits. Grâce à son expérience en communication stratégique B2B, elle veille à la clarté des messages et à la pertinence des contenus.
Votre projet
Comment pouvons-nous vous aider dans votre projet ? Ensemble, nous trouverons la solution qui vous convient !
Vision Channel
Vidéos et sessions en direct autour de la vision industrielle.
Bulletin d'informations
Restez informé en vous abonnant à notre newsletter.
Applications
Découvrez comment les caméras industrielles façonnent l'avenir.